
Эксперт объясняет, как отличить простуду от сенной лихорадки
Простуда и сенная лихорадка могут иметь схожие симптомы, но они вызваны разными причинами. Старший фармацевт Клэр Невинсон объяснила, как различить эти два состояния.
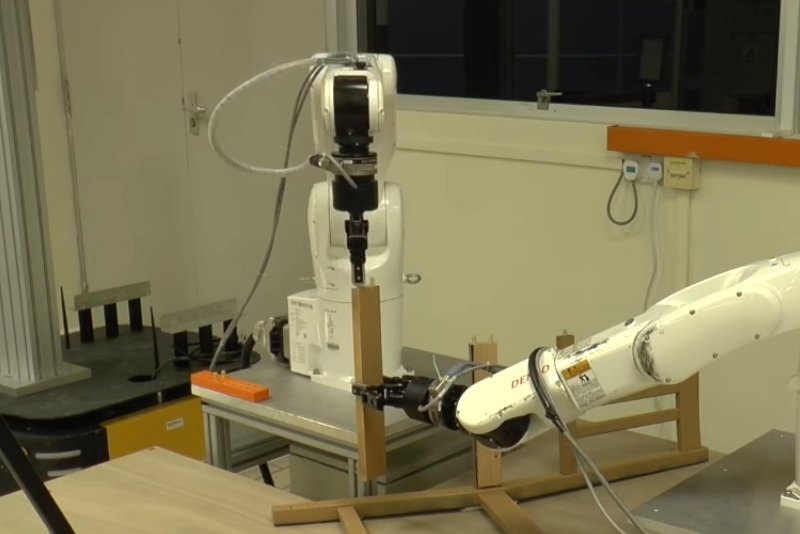
Инженеры из из Наньянского технологического университета под руководством Куанга Кыонга Фама научили двух роботов-манипуляторов собирать стул из IKEA. Роботы самостоятельно выбирают детали и соединяют их в единую конструкцию при помощи шкантов.
Для своей работы разработчики использовали два серийных робоманипулятора с захватами на конце и шестиосевыми датчиками усилия. Перед ними установили 3D-камеру, которая позволила синхронизировать движения и определять положение деталей. Для совместной работы роботов инженерам пришлось создать систему планирования движений, позволяющую выполнять действия вместе. К примеру, один робот может держать деталь, второй – вставлять шкант в паз. Так же система позволяет роботам не сталкиваться во время работы.
Разработчики отмечают, что такое относительно простое занятие, как сборка мебели с подробной инструкцией для роботов сложно тем, что они должны точно знать последовательность сборки. Кроме того, сами роботы должны быть собраны таким образом, чтобы их конструктив не мешал процессу сборки.
В этой области робототехники достаточно мало разработок, в основном машины умеют выполнять базовые операции. Например, просто вставлять шпунт в паз. Сборка мебели целиком является следующей ступенью развития.

















